2_图像常用处理技术与实践
1. 课程目标以及重点
✏️ 信息
- 掌握 PyTorch 的基础知识与搭建模型的基本流程
- 掌握目前常用的图像处理相关的技术
- 掌握深度学习图像分类技术的常用算法实践
- 掌握基于 YOLO 的图像检测技术常用算法实践
2. 课后作业
- 把分类的数据下载到本地,自己实现数据的定义 class 类,替换分类代码里面的通过 torchvision 的方式进行加载
- 完成分类算法通过课上的其它算法的跑通并与之进行对比
- 完成 YOLO 系列的目标检测算法实践的跑通
- 任务:收集这些经典的论文,提前学习相关的原理
- linux 学习:https://www.runoob.com/linux/linux-command-manual.html
- https://hjfy.top/
- 课件里面的 32 是怎么算法?
- Transformer:《Attention is all you need》论文阅读:https://arxiv.org/abs/1706.03762
- 找一个大一点的目标检测的数据集,通过课件的代码跑一下目标检测任务
3. 上节课作业
4. PyTorch 知识总结
- 100,epoch=3,sample=300, batch_size=2,step=150
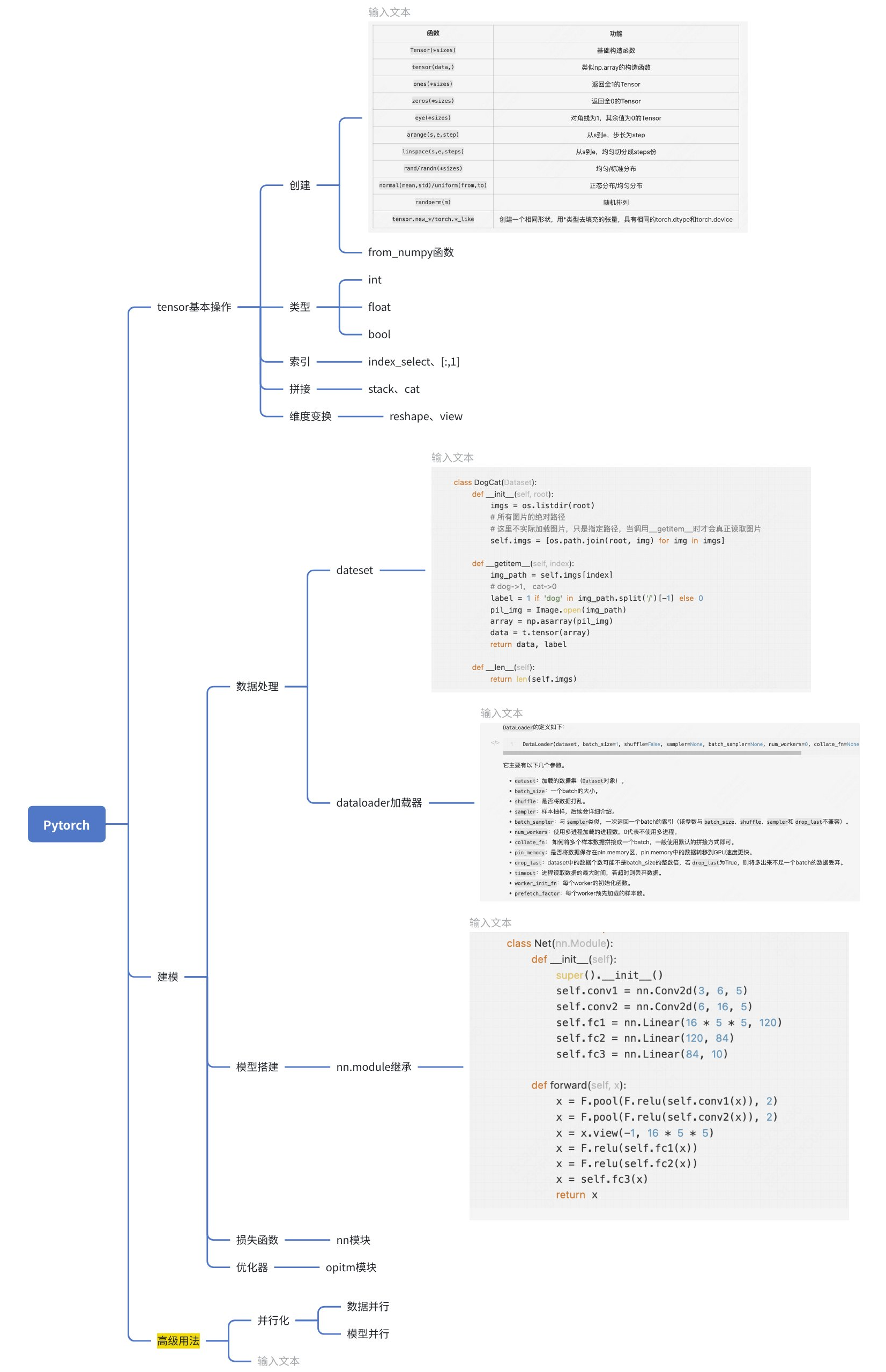
- 相关的代码总结
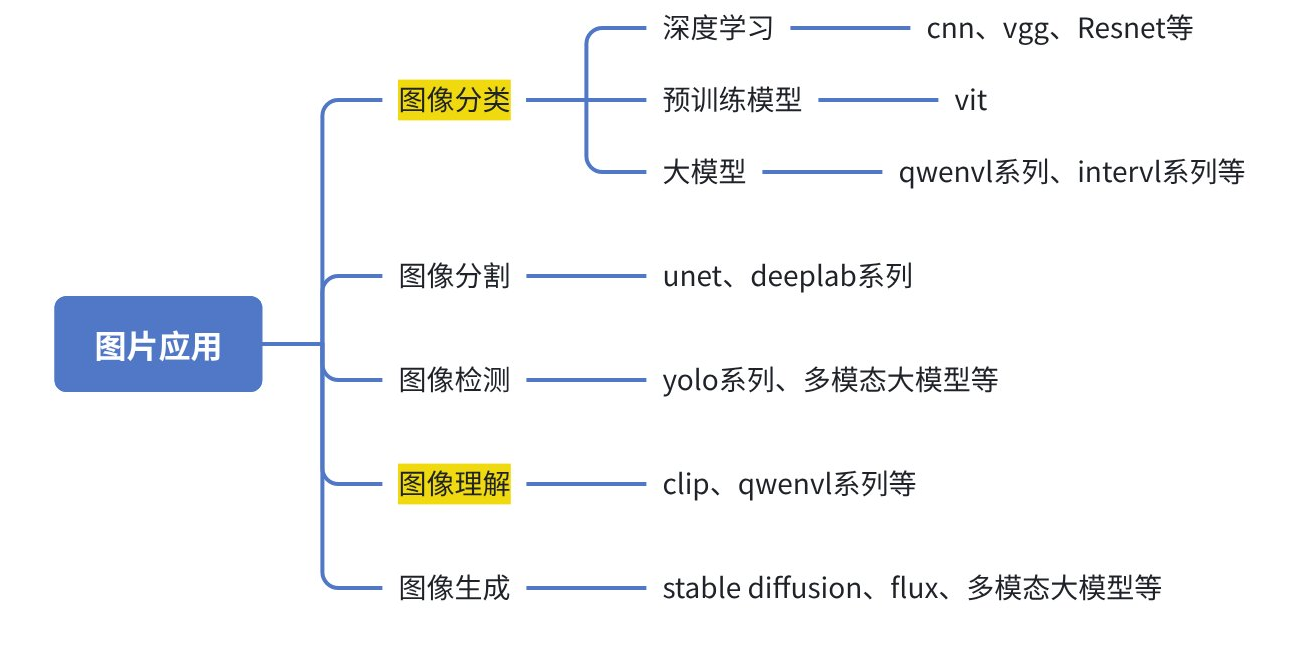
5. 图像处理常用技术介绍
- 目前图像在各个场景的应用主要可以划分为如下的几个方面:
6. 图片分类 - 深度学习
- 本次针对上节课中学习的 PyTorch 框架的使用介绍,以图片分类问题为例,来实现上节课讲的:DNN、CNN、VGG、ResNet 网络来进行图片的分类模型训练;
- 预训练模型:
6.1 数据介绍
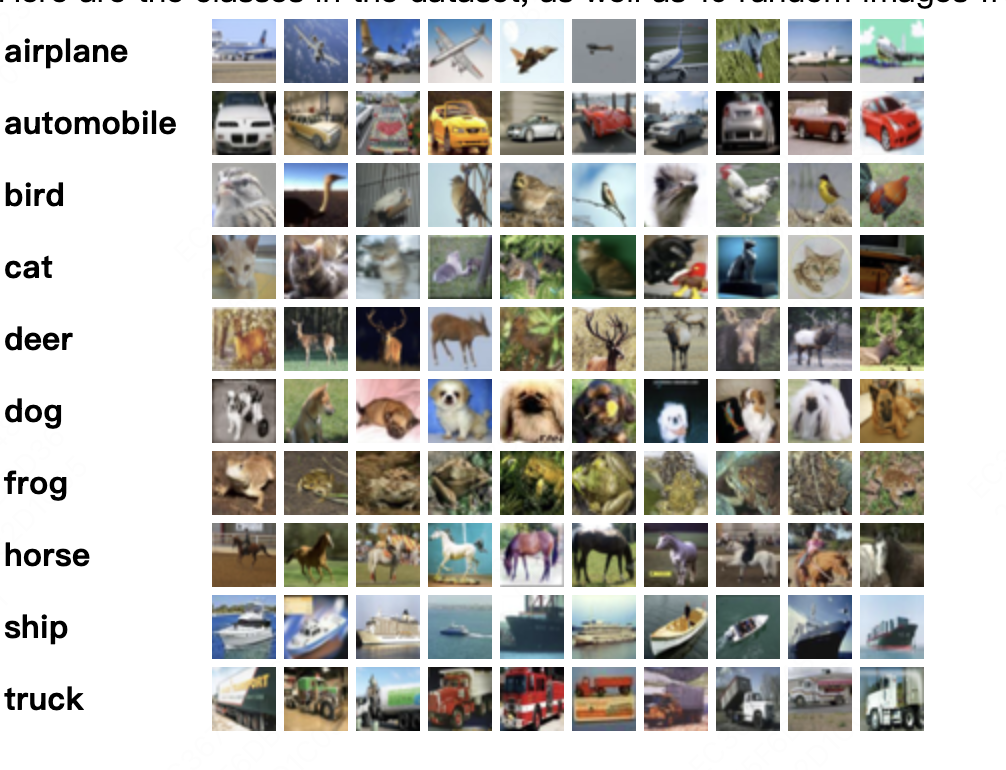
- CIFAR-10 数据集包含 60000 张 32×32 像素的彩色图像,分为 10 个类别,每个类别有 6000 张图像。其中,有 5000 张训练图像和 10000 张测试图像。
- 该数据集被分为五个训练批次和一个测试批次,每个批次包含 10000 张图像。测试批次中恰好包含每个类别随机选取的 1000 张图像。训练批次包含剩余的图像,且这些图像以随机顺序排列,但某些训练批次可能包含来自某一类别的图像比其他类别更多。总体而言,训练批次中每个类别恰好包含 5000 张图像。
- 具体的图片例子
6.2 代码
import torch # PyTorch深度学习框架
import torch.nn as nn # 神经网络模块
import torch.optim as optim # 优化器
import torchvision # 计算机视觉工具包
import torchvision.transforms as transforms # 图像预处理工具
from torch.utils.data import DataLoader, Dataset # 数据加载器和数据集基类
from torchvision.models import vgg16, resnet18 # 预训练模型
import matplotlib.pyplot as plt # 绘图工具
import numpy as np # 数值计算库
import os # 操作系统接口
import cv2 # OpenCV库
from PIL import Image # PIL库用于图像处理
import pickle # 用于加载CIFAR10的pickle文件
# 设置随机种子以确保可重复性
torch.manual_seed(42)
# 检查是否有GPU可用,如果有则使用GPU,否则使用CPU
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 数据路径配置
DATA_ROOT = './data' # 数据根目录
CIFAR10_PATH = os.path.join(DATA_ROOT, 'cifar10') # CIFAR10数据具体存放路径
# 创建保存模型的目录
MODEL_SAVE_DIR = './saved_models'
os.makedirs(MODEL_SAVE_DIR, exist_ok=True)
# CIFAR10类别名称
CIFAR10_CLASSES = ['airplane', 'automobile', 'bird', 'cat', 'deer',
'dog', 'frog', 'horse', 'ship', 'truck']
# 自定义CIFAR10数据集类
class CustomCIFAR10(Dataset):
"""
自定义CIFAR10数据集类,从本地文件加载数据
"""
def __init__(self, root, train=True, transform=None):
"""
参数:
root: 数据根目录
train: True表示训练集,False表示测试集
transform: 数据预处理变换
"""
self.root = root
self.train = train
self.transform = transform
# 加载数据
self.data = []
self.labels = []
if self.train:
# 训练集有5个批次文件
for i in range(1, 6):
file_path = os.path.join(root, f'data_batch_{i}')
with open(file_path, 'rb') as f:
batch = pickle.load(f, encoding='latin1')
self.data.append(batch['data'])
self.labels.extend(batch['labels'])
else:
# 测试集只有1个批次文件
file_path = os.path.join(root, 'test_batch')
with open(file_path, 'rb') as f:
batch = pickle.load(f, encoding='latin1')
self.data.append(batch['data'])
self.labels.extend(batch['labels'])
# 将数据合并为一个numpy数组
self.data = np.vstack(self.data).astype(np.uint8)
# 将数据重塑为 (N, 32, 32, 3) 的形状
self.data = self.data.reshape(-1, 3, 32, 32)
# 转换为 (N, 32, 32, 3) 以便PIL处理
self.data = self.data.transpose((0, 2, 3, 1))
self.labels = np.array(self.labels)
def __len__(self):
return len(self.labels)
def __getitem__(self, idx):
"""
获取单个数据样本
"""
img = self.data[idx]
label = self.labels[idx]
# 转换为PIL图像
img = Image.fromarray(img)
# 应用变换
if self.transform is not None:
img = self.transform(img)
return img, label
# 数据下载函数
def download_cifar10_data(root_dir):
"""
下载CIFAR10数据集到本地
参数:
root_dir: 数据保存目录
返回:
data_dir: 实际数据文件所在目录
"""
os.makedirs(root_dir, exist_ok=True)
# 使用torchvision下载数据(只下载,不加载)
print(f"正在下载CIFAR10数据集到 {root_dir}...")
print("如果数据已存在,将跳过下载。")
# 下载训练集
trainset = torchvision.datasets.CIFAR10(
root=root_dir,
train=True,
download=True,
transform=None
)
# 下载测试集
testset = torchvision.datasets.CIFAR10(
root=root_dir,
train=False,
download=True,
transform=None
)
# CIFAR10数据实际保存在 cifar-10-batches-py 目录下
data_dir = os.path.join(root_dir, 'cifar-10-batches-py')
print(f"数据下载完成,保存在: {data_dir}")
return data_dir
# 数据预处理和加载函数
def load_data():
"""
使用自定义数据集类加载CIFAR10数据
"""
# # 确保数据目录存在
# os.makedirs(CIFAR10_PATH, exist_ok=True)
# # 先下载数据(如果还没有下载)
# data_dir = download_cifar10_data(CIFAR10_PATH)
data_dir = os.path.join(CIFAR10_PATH, 'cifar-10-batches-py')
# 检查数据文件是否存在
if not os.path.exists(data_dir):
raise FileNotFoundError(f"数据目录不存在: {data_dir}")
# 定义训练数据的预处理步骤
transform_train = transforms.Compose([
transforms.RandomCrop(32, padding=4), # 随机裁剪,增加数据多样性
transforms.RandomHorizontalFlip(), # 随机水平翻转,增加数据多样性
transforms.ToTensor(), # 将图像转换为张量
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)), # 标准化,使用CIFAR10数据集的均值和标准差
])
# 定义测试数据的预处理步骤(不需要数据增强)
transform_test = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
print(f"使用自定义数据集类加载CIFAR10数据从 {data_dir}")
# 使用自定义数据集类加载训练数据集
trainset = CustomCIFAR10(
root=data_dir,
train=True,
transform=transform_train
)
# 创建训练数据加载器,设置批量大小为128,打乱数据,使用2个工作进程
trainloader = DataLoader(trainset, batch_size=128, shuffle=True, num_workers=2)
# 使用自定义数据集类加载测试数据集
testset = CustomCIFAR10(
root=data_dir,
train=False,
transform=transform_test
)
# 创建测试数据加载器
testloader = DataLoader(testset, batch_size=128, shuffle=False, num_workers=2)
print(f"数据集加载成功。训练样本数: {len(trainset)}, 测试样本数: {len(testset)}")
return trainloader, testloader
# 定义DNN(深度神经网络)模型
class DNN(nn.Module):
def __init__(self):
super(DNN, self).__init__()
self.flatten = nn.Flatten() # 将输入展平为一维向量
self.fc1 = nn.Linear(32 * 32 * 3, 512) # 第一个全连接层,输入维度为32*32*3(图像大小),输出维度为512
self.fc2 = nn.Linear(512, 256) # 第二个全连接层
self.fc3 = nn.Linear(256, 10) # 输出层,10个类别
self.relu = nn.ReLU() # ReLU激活函数
self.dropout = nn.Dropout(0.5) # Dropout层,防止过拟合
def forward(self, x):
x = self.flatten(x) # 展平输入
x = self.relu(self.fc1(x)) # 第一个全连接层+激活函数
x = self.dropout(x) # Dropout
x = self.relu(self.fc2(x)) # 第二个全连接层+激活函数
x = self.dropout(x) # Dropout
x = self.fc3(x) # 输出层
return x
# 定义CNN(卷积神经网络)模型
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
# 第一个卷积层:输入通道3(RGB),输出通道32,卷积核大小3x3,padding=1保持特征图大小
self.conv1 = nn.Conv2d(3, 32, 3, padding=1)
# 第二个卷积层:输入通道32,输出通道64
self.conv2 = nn.Conv2d(32, 64, 3, padding=1)
# 第三个卷积层:输入通道64,输出通道128
self.conv3 = nn.Conv2d(64, 128, 3, padding=1)
# 最大池化层:2x2窗口,步长2
self.pool = nn.MaxPool2d(2, 2)
# 全连接层:输入维度128*4*4(经过三次池化后的特征图大小),输出维度512
self.fc1 = nn.Linear(128 * 4 * 4, 512)
# 输出层:输入维度512,输出维度10(类别数)
self.fc2 = nn.Linear(512, 10)
self.relu = nn.ReLU() # ReLU激活函数
self.dropout = nn.Dropout(0.5) # Dropout层
def forward(self, x):
x = self.pool(self.relu(self.conv1(x))) # 第一个卷积块
x = self.pool(self.relu(self.conv2(x))) # 第二个卷积块
x = self.pool(self.relu(self.conv3(x))) # 第三个卷积块
x = x.view(-1, 128 * 4 * 4) # 展平特征图
x = self.dropout(self.relu(self.fc1(x))) # 全连接层+Dropout
x = self.fc2(x) # 输出层
return x
# 模型训练函数
def train_model(model, trainloader, testloader, criterion, optimizer, num_epochs=10, model_name='model'):
"""
训练模型并保存最佳模型
参数:
model: 要训练的模型
trainloader: 训练数据加载器
testloader: 测试数据加载器
criterion: 损失函数
optimizer: 优化器
num_epochs: 训练轮数
model_name: 模型名称,用于保存文件
"""
train_losses = [] # 记录训练损失
test_accuracies = [] # 记录测试准确率
best_accuracy = 0.0 # 记录最佳准确率
for epoch in range(num_epochs):
model.train() # 设置为训练模式
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
inputs, labels = data[0].to(device), data[1].to(device) # 将数据移到指定设备
optimizer.zero_grad() # 清空梯度
outputs = model(inputs) # 前向传播
loss = criterion(outputs, labels) # 计算损失
loss.backward() # 反向传播
optimizer.step() # 更新参数
running_loss += loss.item()
epoch_loss = running_loss / len(trainloader) # 计算平均损失
train_losses.append(epoch_loss)
# 在测试集上评估模型
model.eval() # 设置为评估模式
correct = 0
total = 0
with torch.no_grad(): # 不计算梯度
for data in testloader:
images, labels = data[0].to(device), data[1].to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1) # 获取预测结果
total += labels.size(0)
correct += (predicted == labels).sum().item()
accuracy = 100 * correct / total # 计算准确率
test_accuracies.append(accuracy)
print(f'Epoch {epoch+1}/{num_epochs}, Loss: {epoch_loss:.4f}, Accuracy: {accuracy:.2f}%')
# 保存最佳模型
if accuracy > best_accuracy:
best_accuracy = accuracy
# 保存模型状态字典
model_save_path = os.path.join(MODEL_SAVE_DIR, f'{model_name}_best.pth')
torch.save({
'epoch': epoch,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'accuracy': accuracy,
'loss': epoch_loss,
}, model_save_path)
print(f'保存最佳模型,准确率: {accuracy:.2f}%')
return train_losses, test_accuracies
def predict_image(model, image_path, model_name='model'):
"""
使用保存的最佳模型对单张图片进行预测
参数:
model: 模型实例
image_path: 图片路径
model_name: 模型名称
返回:
predicted_class: 预测的类别
confidence: 预测的置信度
"""
# 加载最佳模型
model_path = os.path.join(MODEL_SAVE_DIR, f'{model_name}_best.pth')
if not os.path.exists(model_path):
raise FileNotFoundError(f"找不到模型文件: {model_path}")
checkpoint = torch.load(model_path)
model.load_state_dict(checkpoint['model_state_dict'])
model.eval()
# 图像预处理
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
# 读取并预处理图像
image = cv2.imread(image_path)
if image is None:
raise ValueError(f"无法读取图像: {image_path}")
# 转换为RGB
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# 转换为PIL图像
image = Image.fromarray(image)
# 应用预处理
image = transform(image)
image = image.unsqueeze(0) # 添加batch维度
image = image.to(device)
# 进行预测
with torch.no_grad():
outputs = model(image)
probabilities = torch.nn.functional.softmax(outputs, dim=1)
confidence, predicted = torch.max(probabilities, 1)
return CIFAR10_CLASSES[predicted.item()], confidence.item()
def predict_batch(model, image_paths, model_name='model'):
"""
使用保存的最佳模型对多张图片进行批量预测
参数:
model: 模型实例
image_paths: 图片路径列表
model_name: 模型名称
返回:
predictions: 预测结果列表,每个元素为(预测类别, 置信度)的元组
"""
# 加载最佳模型
model_path = os.path.join(MODEL_SAVE_DIR, f'{model_name}_best.pth')
if not os.path.exists(model_path):
raise FileNotFoundError(f"找不到模型文件: {model_path}")
checkpoint = torch.load(model_path)
model.load_state_dict(checkpoint['model_state_dict'])
model.eval()
# 图像预处理
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
predictions = []
for image_path in image_paths:
try:
# 读取并预处理图像
image = cv2.imread(image_path)
if image is None:
print(f"警告: 无法读取图像 {image_path}")
continue
# 转换为RGB
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# 转换为PIL图像
image = Image.fromarray(image)
# 应用预处理
image = transform(image)
image = image.unsqueeze(0) # 添加batch维度
image = image.to(device)
# 进行预测
with torch.no_grad():
outputs = model(image)
probabilities = torch.nn.functional.softmax(outputs, dim=1)
confidence, predicted = torch.max(probabilities, 1)
predictions.append((CIFAR10_CLASSES[predicted.item()], confidence.item()))
except Exception as e:
print(f"处理图像 {image_path} 时出错: {str(e)}")
predictions.append(None)
return predictions
def main():
# 检查数据目录
if not os.path.exists(CIFAR10_PATH):
print(f"Data directory {CIFAR10_PATH} does not exist. It will be created when downloading the dataset.")
trainloader, testloader = load_data() # 加载数据
criterion = nn.CrossEntropyLoss() # 定义损失函数
# 训练DNN模型
print("Training DNN model...")
dnn_model = DNN().to(device)
dnn_optimizer = optim.Adam(dnn_model.parameters(), lr=0.001) # 使用Adam优化器
dnn_losses, dnn_accuracies = train_model(dnn_model, trainloader, testloader, criterion, dnn_optimizer, model_name='dnn')
# 训练CNN模型
print("\nTraining CNN model...")
cnn_model = CNN().to(device)
cnn_optimizer = optim.Adam(cnn_model.parameters(), lr=0.001)
cnn_losses, cnn_accuracies = train_model(cnn_model, trainloader, testloader, criterion, cnn_optimizer, model_name='cnn')
# 微调VGG16预训练模型
print("\nFine-tuning VGG16 model...")
vgg_model = vgg16(pretrained=True) # 加载预训练的VGG16模型
vgg_model.classifier[6] = nn.Linear(4096, 10) # 修改最后一层以适应CIFAR10的10个类别
vgg_model = vgg_model.to(device)
vgg_optimizer = optim.Adam(vgg_model.parameters(), lr=0.0001) # 使用较小的学习率进行微调
vgg_losses, vgg_accuracies = train_model(vgg_model, trainloader, testloader, criterion, vgg_optimizer, model_name='vgg16')
# 微调ResNet18预训练模型
print("\nFine-tuning ResNet18 model...")
resnet_model = resnet18(pretrained=True) # 加载预训练的ResNet18模型
resnet_model.fc = nn.Linear(512, 10) # 修改最后一层以适应CIFAR10的10个类别
resnet_model = resnet_model.to(device)
resnet_optimizer = optim.Adam(resnet_model.parameters(), lr=0.0001) # 使用较小的学习率进行微调
resnet_losses, resnet_accuracies = train_model(resnet_model, trainloader, testloader, criterion, resnet_optimizer, model_name='ResNet18')
# 绘制训练损失和测试准确率对比图
plt.figure(figsize=(12, 5))
# 绘制训练损失曲线
plt.subplot(1, 2, 1)
plt.plot(dnn_losses, label='DNN')
plt.plot(cnn_losses, label='CNN')
plt.plot(vgg_losses, label='VGG16')
plt.plot(resnet_losses, label='ResNet18')
plt.title('Training Loss')
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.legend()
# 绘制测试准确率曲线
plt.subplot(1, 2, 2)
plt.plot(dnn_accuracies, label='DNN')
plt.plot(cnn_accuracies, label='CNN')
plt.plot(vgg_accuracies, label='VGG16')
plt.plot(resnet_accuracies, label='ResNet18')
plt.title('Test Accuracy')
plt.xlabel('Epoch')
plt.ylabel('Accuracy (%)')
plt.legend()
plt.tight_layout() # 自动调整子图布局
plt.savefig('training_results.png') # 保存图表
plt.close()
# 示例:使用训练好的模型进行预测
print("\n使用训练好的模型进行预测示例:")
test_image_path = 'test_image.jpg' # 替换为你的测试图像路径
try:
# 使用VGG16模型进行预测
predicted_class, confidence = predict_image(vgg_model, test_image_path, model_name='vgg16')
print(f"VGG16预测结果: 类别={predicted_class}, 置信度={confidence:.2f}")
# 使用ResNet18模型进行预测
predicted_class, confidence = predict_image(resnet_model, test_image_path, model_name='ResNet18')
print(f"ResNet18预测结果: 类别={predicted_class}, 置信度={confidence:.2f}")
# 批量预测示例
test_images = ['test_image1.jpg', 'test_image2.jpg'] # 替换为你的测试图像路径列表
predictions = predict_batch(vgg_model, test_images, model_name='vgg16')
print("\n批量预测结果:")
for img_path, pred in zip(test_images, predictions):
if pred is not None:
print(f"图像 {img_path}: 类别={pred[0]}, 置信度={pred[1]:.2f}")
else:
print(f"图像 {img_path}: 预测失败")
except Exception as e:
print(f"预测过程中出错: {str(e)}")
if __name__ == '__main__':
main()7. 图像检测 -YOLO 系列
7.1 背景介绍
✏️ 信息
论文:https://arxiv.org/abs/1506.02640
目标检测的背景: 目标检测是计算机视觉中的一项关键任务,广泛应用于自动驾驶、安防监控、无人机导航和智能家居等领域。目标检测需要解决两个问题:
- 物体分类:确定图像中物体的类别。
- 定位问题:精确地找到每个物体的具体位置,通常用边界框表示。 https://developer.volcengine.com/articles/7416323031217225778#heading4
7.2 简单回顾:早期目标检测算法
| 方法 | 描述 | 优点 | 缺点 |
| DPM Deformable Parts Model | 基于 HOG 特征和滑动窗口进行目标检测。 | 具有良好的形状建模能力。 |
|
| R-CNN (Regions with CNN Features) | 通过选择性搜索生成候选框,用 CNN 对每个候选框进行分类。 | 检测精度高。 |
|
| Fast R-CNN | 将特征提取和分类整合到同一个网络中。 |
| 候选框生成仍依赖选择性搜索,速度瓶颈未能完全解决。 |
| Faster R-CNN | 引入区域建议网络(RPN),取代选择性搜索生成候选框。 |
| 检测速度未能达到实时需求。 |
| YOLOv1 | YOLOv1 将目标检测转化为回归问题,通过一个统一的神经网络直接输出边界框和类别。 |
| |
| MLLM |
7.3 YOLO1 算法思想
7.4 思想
YOLOv1 将目标检测问题作为回归问题。会将输入图像分成
对于每个 grid cell:
- 预测 B 个边界框,每个框都有一个置信度分数(confidence score)这些框大小尺寸等等都随便,只有一个要求,就是生成框的中心点必须在 grid cell 里。
- 每个边界框包含 5 个元素:(x,y,w,h,c)
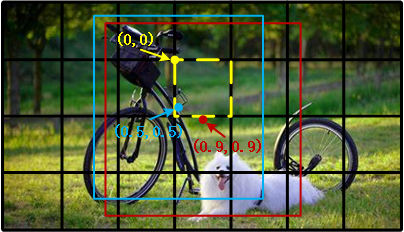
- x,y: 是指 bounding box 的预测框的中心坐标相较于该 bounding box 归属的 grid cell 左上角的偏移量,在 0-1 之间。在下图中,黄色虚线框代表 grid cell,黄点表示该 grid cell 的左上角坐标,为(0,0);红色和蓝色框代表该 grid cell 包含的两个 bounding box,红点和蓝点表示这两个 bounding box 的中心坐标。有一点很重要,bounding box 的中心坐标一定在该 grid cell 内部,因此,红点和蓝点的坐标可以归一化在 0-1 之间。在上图中,红点的坐标为(0.5,0.5),即 x=y=0.5,蓝点的坐标为(0.9,0.9),即 x=y=0.9。
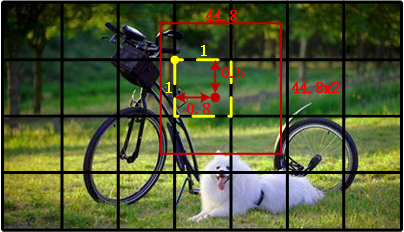
- w,h: 是指该 bounding box 的宽和高,但也归一化到了 0-1 之间,表示相较于原始图像的宽和高(即 448 个像素)。比如该 bounding box 预测的框宽是 44.8 个像素,高也是 44.8 个像素,则 w=0.1,h=0.1。如下图所示:红框的 x=0.8,y=0.5,w=0.1,h=0.2。
- 不管框 B 的数量是多少,只负责预测一个目标。
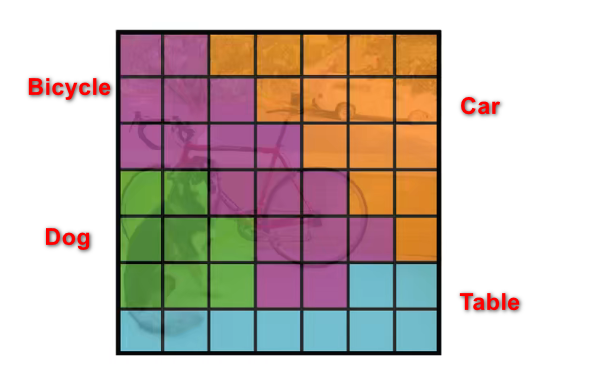
- 预测 C 个条件概率类别(物体属于每一种类别的可能性)
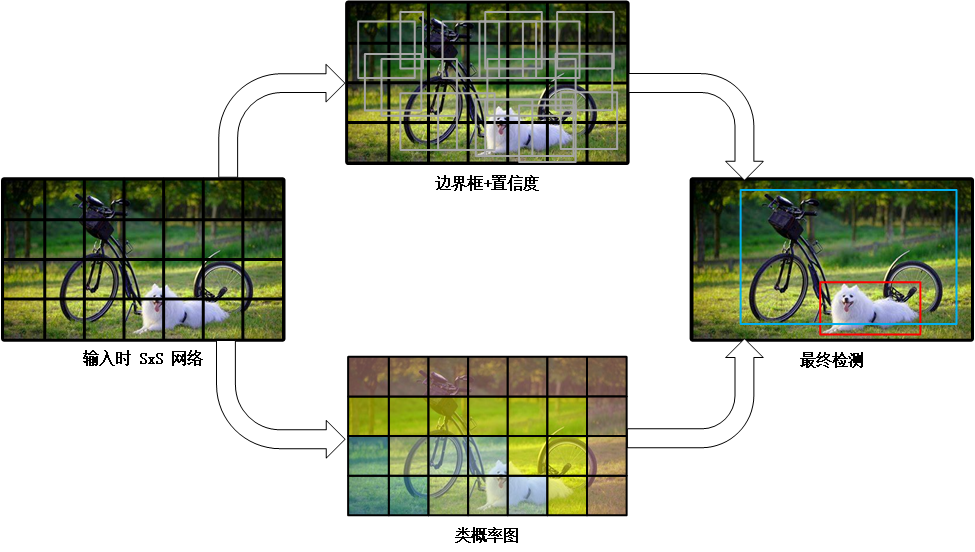
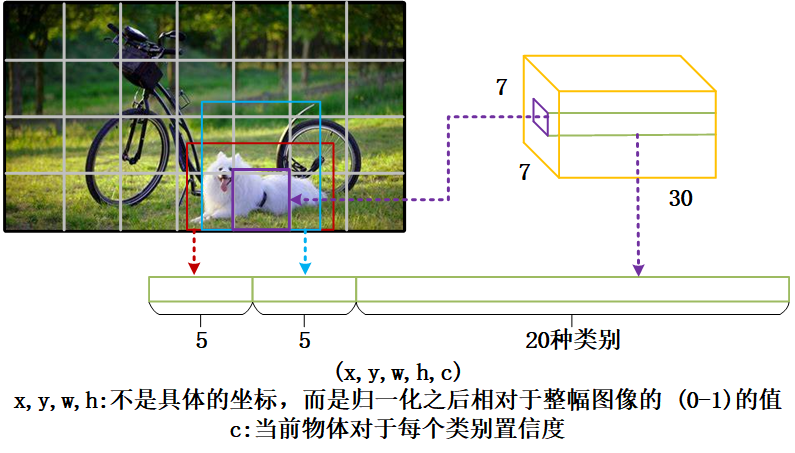
综上,S×S 个网格,每个网格要预测 B 个 bounding box (中间上图),还要预测 C 个类(中间下图)。将两图合并,网络输出就是一个 S × S × (5×B+C)。(S x S 个网格,每个网格都有 B 个预测框,每个框又有 5 个参数,再加上每个网格都有 C 个预测类)
Q1:为什么每个网格有固定的 B 个 bounding box?(即 B=2)
在训练的时候会在线地计算每个 predictor 预测的 bounding box 和 ground truth 的 IOU,计算出来的 IOU 大的那个 predictor,就会负责预测这个物体,另外一个则不预测。这么做有什么好处?我的理解是,这样做的话,实际上有两个 predictor 来一起进行预测,然后网络会在线选择预测得好的那个 predictor(也就是 IOU 大)来进行预测。
Q2:每个网格预测的两个 bounding box 是怎么得到的?
YOLOv1 中两个 bounding box 的边界框尺寸和形状是通过训练数据自动学习得到的 box,在训练开始时作为超参数输入 bounding box 的信息,随着训练次数增加,loss 降低,bounding box 越来越准确。Faster RCNN 也是人为选定的(9 个 不同长宽比和 scale),YOLOv2 中的 5 个 bounding box 是通过对训练集的 bounding box 进行 k-means 聚类分析得到的。。
7.5 预测特征组成
最终的预测特征由边框的位置、置信度得分以及类别概率组成,这三者的含义如下:
- 边框位置: 对每一个边框需要预测其中心坐标及宽、高这 4 个量, 两个边框共计 8 个预测值边界框宽度 w 和高度 h 用图像宽度和高度归一化。因此 x,y,w,h 都在 0 和 1 之间。
- 置信度得分 (box confidence score) c : 框包含一个目标的可能性以及边界框的准确程度。类似于 Faster RCNN 中是前景还是背景。由于有两个边框,因此会存在两个置信度预测值。
- 类别概率: 由于 PASCAL VOC 数据集一共有 20 个物体类别,因此这里预测的是边框属于哪一个类别。
置信度的计算公式为:
置信度由两部分组成:
- 物体存在的概率(Pr(Object)): 表示该边界框内存在物体的概率。
- 预测框与真实框的交并比(IoU): 衡量预测框与真实框重叠程度的指标。
置信度的作用:
有物体的网格单元: 如果网格单元包含物体,则置信度的目标值为预测框与真实框的 IoU。
无物体的网格单元: 如果网格单元不包含物体,则置信度的目标值为 0。
7.6 注意
- 一个 cell 预测的两个边界框共用一个类别预测, 在训练时会选取与标签 IoU 更大的一个边框负责回归该真实物体框,在测试时会选取置信度更高的一个边框,另一个会被舍弃,因此 7×7=49 个 grid cell 最多只能预测 49 个物体。
- 因为每一个 grid cell 只能有一个分类,也就是他只能预测一个物体,这也是导致 YOLO 对小目标物体性能比较差的原因。如果所给图片极其密集,导致 grid cell 里可能有多个物体,但是 YOLOv1 模型只能预测出来一个,那这样就会忽略在本 grid cell 内的其他物体(缺点:对小目标检测性能较差)。
7.7 网络结构
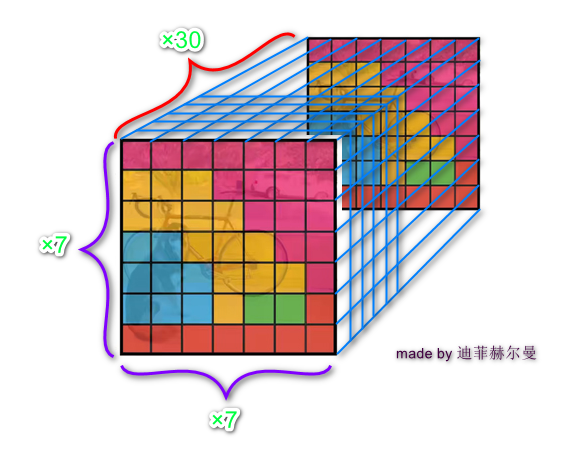
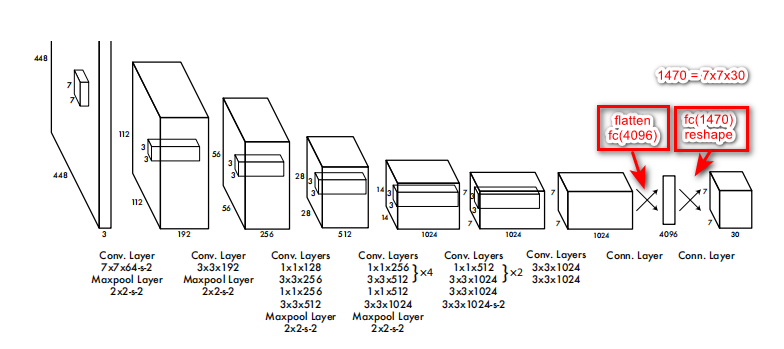
YOLOv1 的网络架构灵感来源于 GoogLeNet,输入图像的尺寸为 448×448,经过 24 个卷积层,2 个全连接的层(FC),最后在 reshape 操作,输出的特征图大小为 7×7×30。
Q:7×7×30 怎么来的?
(图片来源:YOLO v1详细解读_yolov1详解_迪菲赫尔曼的博客-CSDN博客)
7×7: 一共划分成 7×7 的网格。
补充: Q:为什么 backbone 输出空间尺寸为 7×7 的 featuremap 就对应在输入图上划分 7×7 个网格?A: 这是 backbone 中的不重叠 maxpooling 造成的,从而 Grid cell 的大小/分辨率就是总下采样率
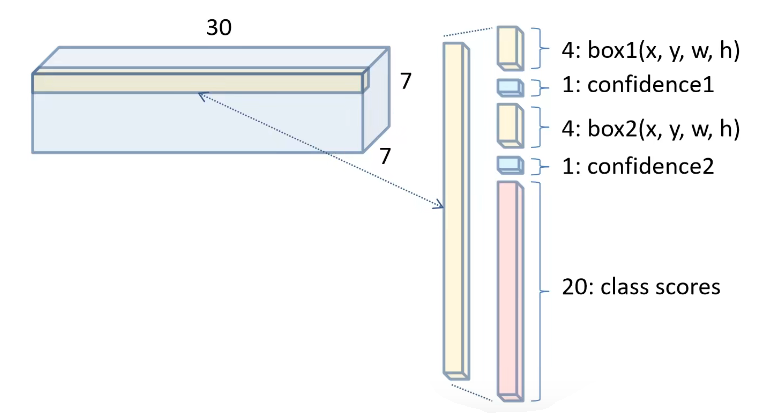
30: 30 包含了两个预测框的参数和 Pascal VOC 的类别参数:每个预测框有 5 个参数:x,y,w,h,confidence。另外,Pascal VOC 里面还有 20 个类别;所以最后的 30 实际上是由 5x2+20 组成的,也就是说这一个 30 维的向量就是一个 grid cell 的信息。 7×7×30: 总共是 7 × 7 个 grid cell 一共就是 7 × 7 ×(2 × 5+ 20)= 7 × 7 × 30 tensor = 1470 outputs,正好对应论文。
7.8 网络详解
- YOLO 主要是建立一个 CNN 网络生成预测7×7×1024 的张量 。
- 然后使用两个全连接层执行线性回归,以进行7×7×2 边界框(bounding box)预测。将具有高置信度得分(大于 0.25)的结果作为最终预测。
- 在 3×3 的卷积后通常会接一个通道数更低1×1的卷积,这种方式既降低了计算量,同时也提升了模型的非线性能力。
- 除了最后一层使用了线性激活函数外,其余层的激活函数为 Leaky ReLU 。
- 在训练中使用了 Dropout 与数据增强的方法来防止过拟合。
- 对于最后一个卷积层,它输出一个形状为 (7, 7, 1024) 的张量。 然后张量展开。使用 2 个全连接层作为一种线性回归的形式,它输出 1470 个参数,然后 reshape 为 (7, 7, 30) 。
7.9 NMS,非极大值抑制
NMS 算法主要解决的是一个目标被多次检测的问题,意义主要在于在一个区域里交叠的很多框选一个最优的。
- 对于上述的 98 列数据,先看某一个类别,也就是只看 98 列的这一行所有数据,先拿出最大值概率的那个框,剩下的每一个都与它做比较,如果两者的 IoU 大于某个阈值,则认为这俩框重复识别了同一个物体,就将其中低概率的重置成 0。
- 最大的那个框和其他的框比完之后,再从剩下的框找最大的,继续和其他的比,依次类推对所有类别进行操作。 注意,这里不能直接选择最大的,因为有可能图中有多个该类别的物体,所以 IoU 如果小于某个阈值,则会被保留。
- 最后得到一个稀疏矩阵,因为里面有很多地方都被重置成 0,拿出来不是 0 的地方拿出来概率和类别,就得到最后的目标检测结果了。
✏️ 信息
注意: NMS 只发生在预测阶段,训练阶段是不能用 NMS 的,因为在训练阶段不管这个框是否用于预测物体的,他都和损失函数相关,不能随便重置成 0。
- 具体例子
✏️ 信息
它的核心目的是:去重。 因为神经网络很“啰嗦”,对于同一个物体(比如图里的那只狗),它可能会预测出好几个框。我们需要把重复的框删掉,只保留最准的那个,同时还要小心不要误删掉另一只狗。 为了让你听懂,我们假设图里其实有 两只狗(虽然原图只有一只,但我们假设场景),算法一共预测出了 5 个框,它们的分数(概率)和位置如下:
- Box A (0.9 分): 框住了左边的狗(位置很准)。
- Box B (0.6 分): 也框住了左边的狗(位置偏了一点)。
- Box C (0.5 分): 也框住了左边的狗(位置偏了很多)。
- Box D (0.8 分): 框住了右边的狗(假设右边还有一只)。
- Box E (0.4 分): 也框住了右边的狗(位置偏了一点)。
具体操作流程(对应你图片里的第 2 点):
第一轮:找“老大”
挑出最大值: 在所有框里,分数最高的是 Box A (0.9)。我们把它定为当前的“老大”(
bbox_max)。开始 PK(计算 IoU): 让老大 A 跟剩下的所有人比重叠度(IoU)。
- A vs B: 重叠度很高(因为它们都框左边的狗)。结论:B 是多余的,把 B 的概率置为 0(杀掉)。
- A vs C: 重叠度很高。结论:C 也是多余的,把 C 的概率置为 0(杀掉)。
- A vs D: 重叠度很低(A 框左边,D 框右边)。结论:D 是另一只狗,D 存活。
- A vs E: 重叠度很低。结论:E 可能是另一只狗,E 存活。
此时状态: A (0.9) 存活,B (0) 死,C (0) 死,D (0.8) 存活,E (0.4) 存活。
第二轮:找“剩下的老大”
原文说:“最大的那个框和别的框比完之后,再从剩下的框找最大的”。
再挑最大值: 现在 A 已经比完了(它是第一轮的赢家)。我们在剩下还活着的框(D 和 E)里找分数最高的。
- 剩下的最高分是 Box D (0.8)。
继续 PK: 让新的老大 D 跟剩下的比。
- D vs E: 重叠度很高(都框右边的狗)。结论:E 是多余的,把 E 的概率置为 0(杀掉)。
此时状态: A (0.9) 存活,D (0.8) 存活,其他全死。
第三轮:结束
剩下的框里没有比 D 分数更高的了,或者剩下的分数都太低被过滤掉了。流程结束。 最终结果: 我们得到了两个框 A 和 D,分别代表图中的两只狗。
7.10 损失函数
YOLOv1 的损失函数结合了边界框的定位、置信度预测和类别分类的多任务损失。
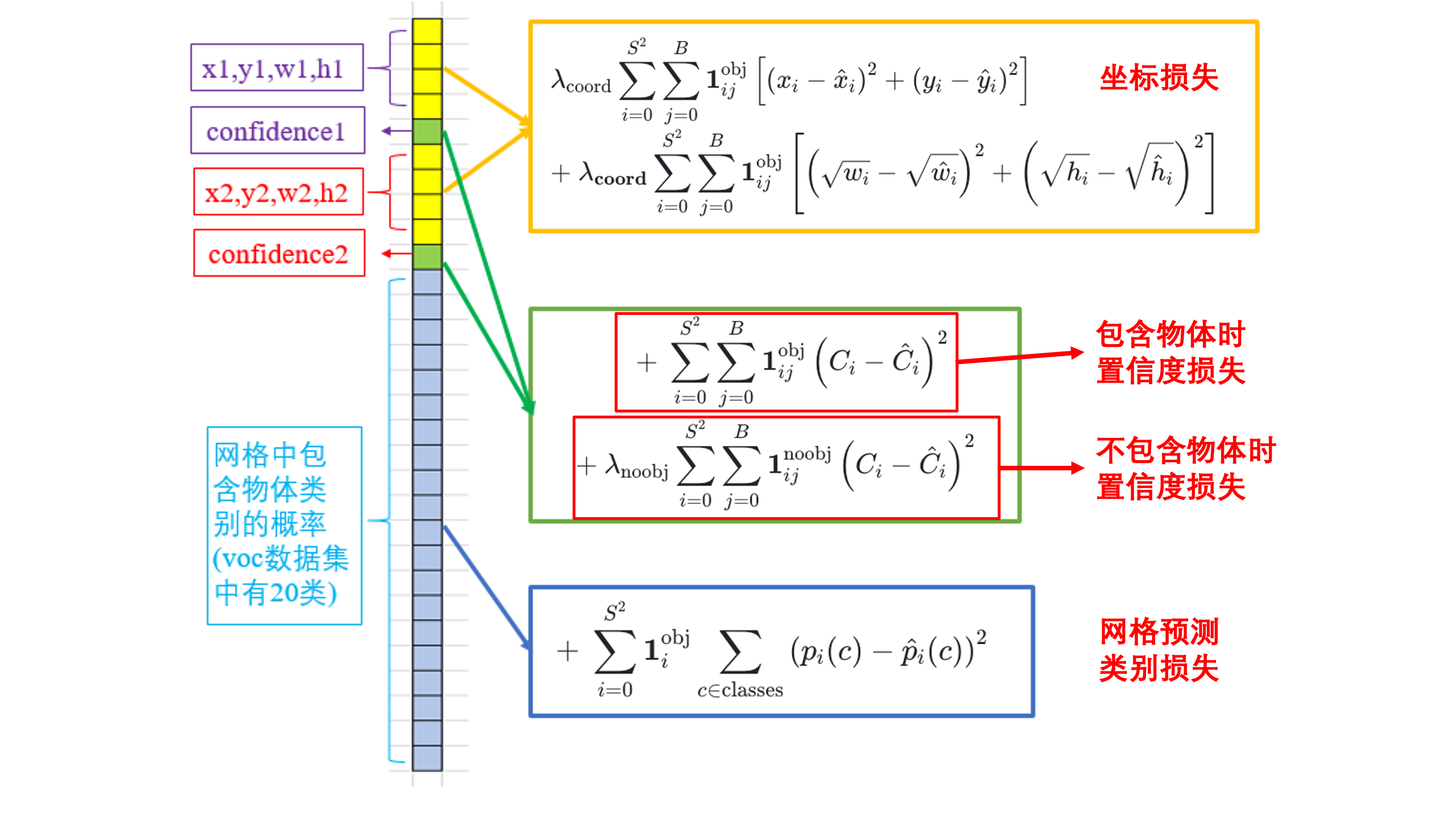
定位损失(Localization Loss):
衡量预测边界框与真实框的偏差。
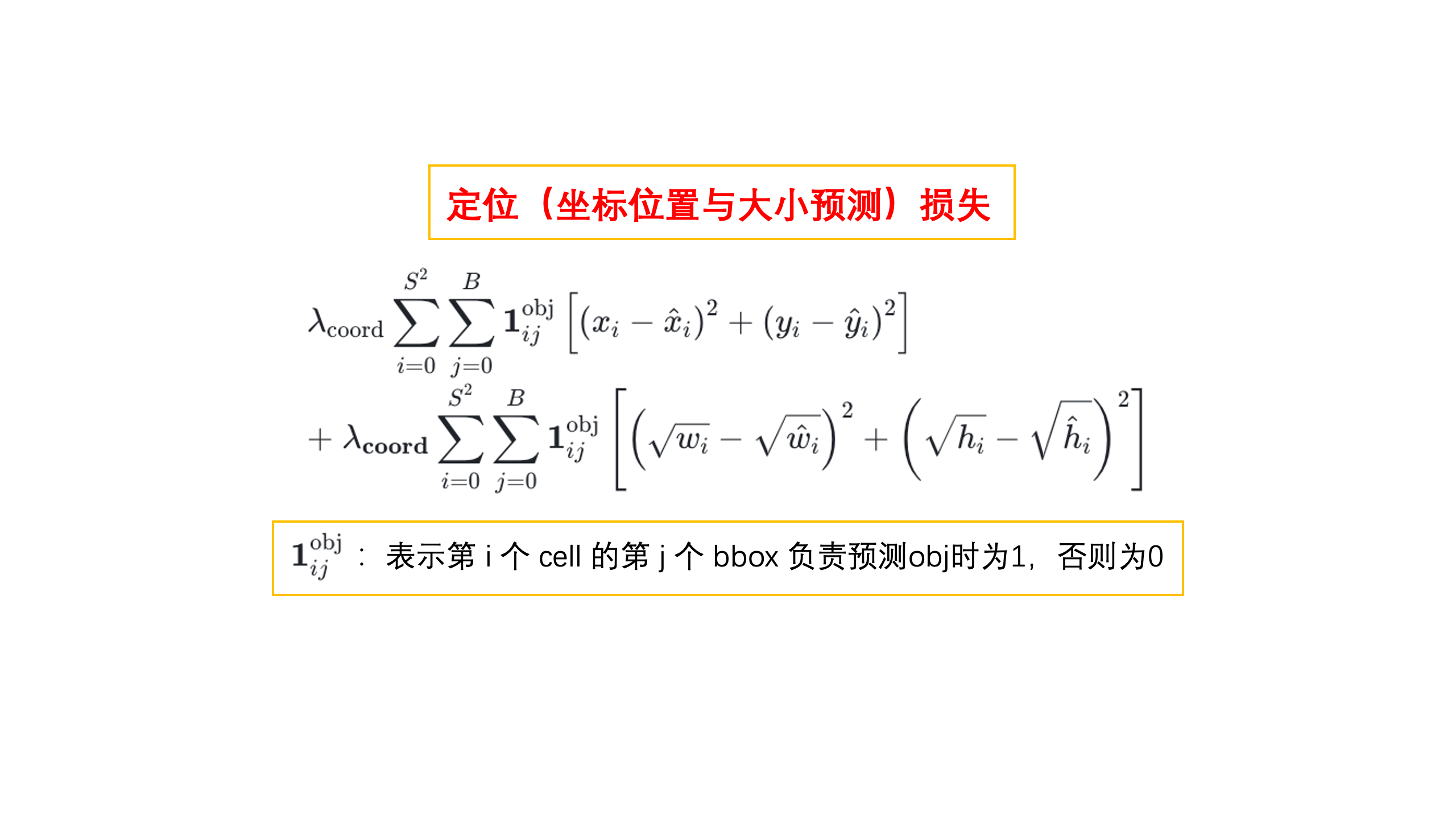
- 第一行:负责检测物体的框中心点(x, y)定位误差。
- 第二行:负责检测物体的框的高宽(w,h) 定位误差,这个根号的作用就是为了修正对大小框一视同仁的缺点,削弱大框的误差。
的作用,就是让含有物体的格点,在损失函数中的权重更大,让模型更加“重视”含有物体的格点所造成的损失。在论文中, 的取值为 5。
置信度损失(Confidence Loss):
衡量预测框是否包含物体的置信度与真实值的差异。
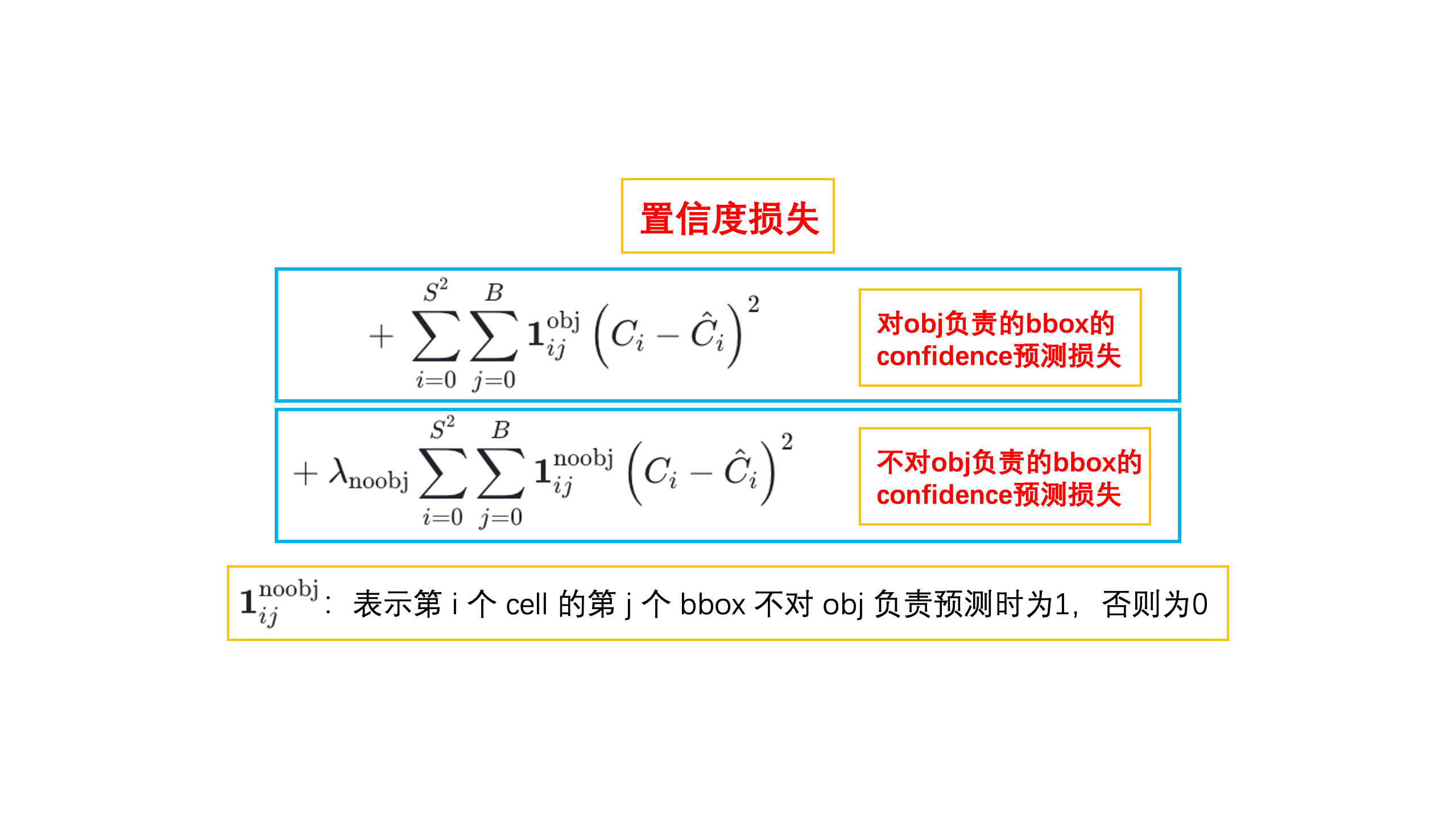
- 第一行:负责检测物体的那个框的置信度误差。
- 第二行:不负责检测物体的那个框的置信度误差。
- YOLOv1 的输出中有 49(7x7) 个格点,含有物体的格点往往只有 3、4 个,其余全是不含有物体的格点。此时如果不采取点措施,那么物体检测的 mAP 不会太高,因为模型更倾向于不含有物体的格点。
的作用,就是让不含有物体的格点,在损失函数中的权重更小,让模型更加“忽视“不含有物体的格点所造成的损失。在论文中, 的取值为 0.5。
分类损失(Classification Loss):
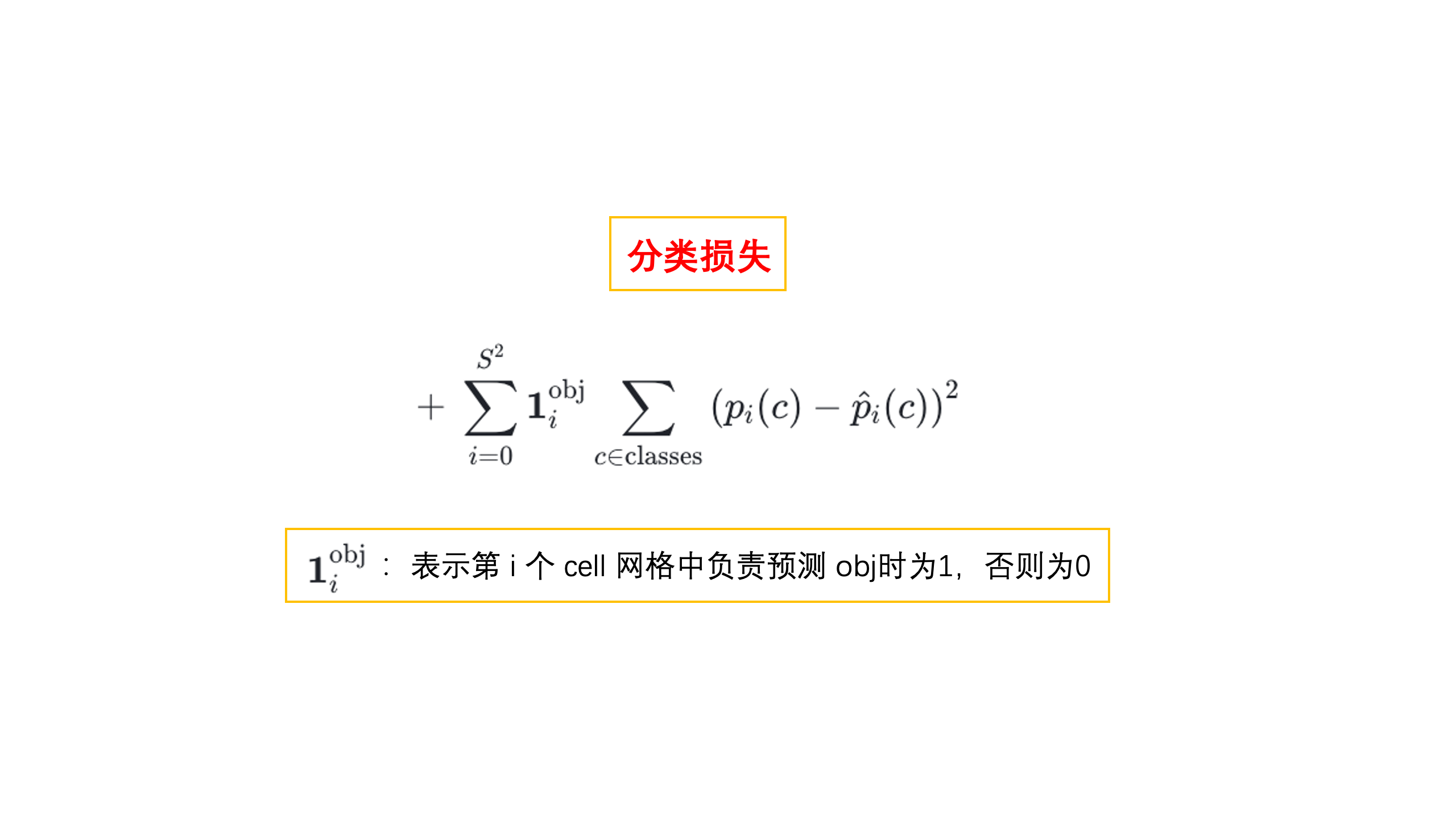
衡量预测的类别概率分布与真实类别的差异。
7.11 YOLOv1 的优缺点
| 优点 | 描述 |
|---|---|
| 速度快 | 基础版 YOLO 在 Titan X GPU 上达 45 FPS,快速版达 155 FPS。 |
| 全局上下文感知 | YOLO 在检测时考虑整幅图像的信息,减少了背景误检。 |
| 高泛化能力 | 在跨领域任务中(如艺术图像),表现优于其他方法。 |
| 缺点 | 描述 |
|---|---|
| 小目标检测性能较差 | 下采样导致小目标的特征丢失。 |
| 密集目标检测能力有限 | 每个网格单元只能检测一个物体。 |
| 边界框灵活性不足 | 对于不常见的目标长宽比,泛化能力较弱。 |
7.12 YOLOv2
- 迭轮子:Transform+
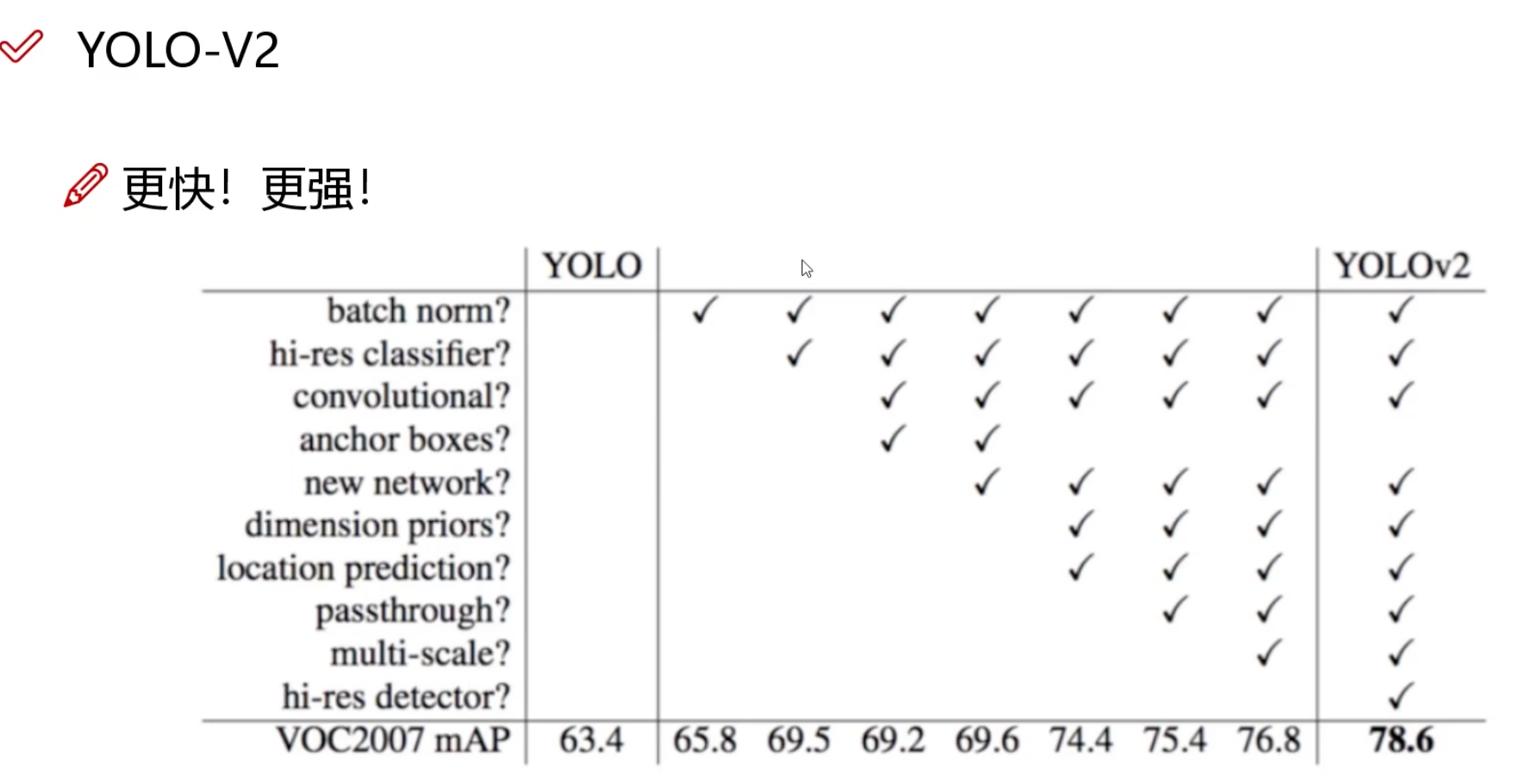
✏️ 信息
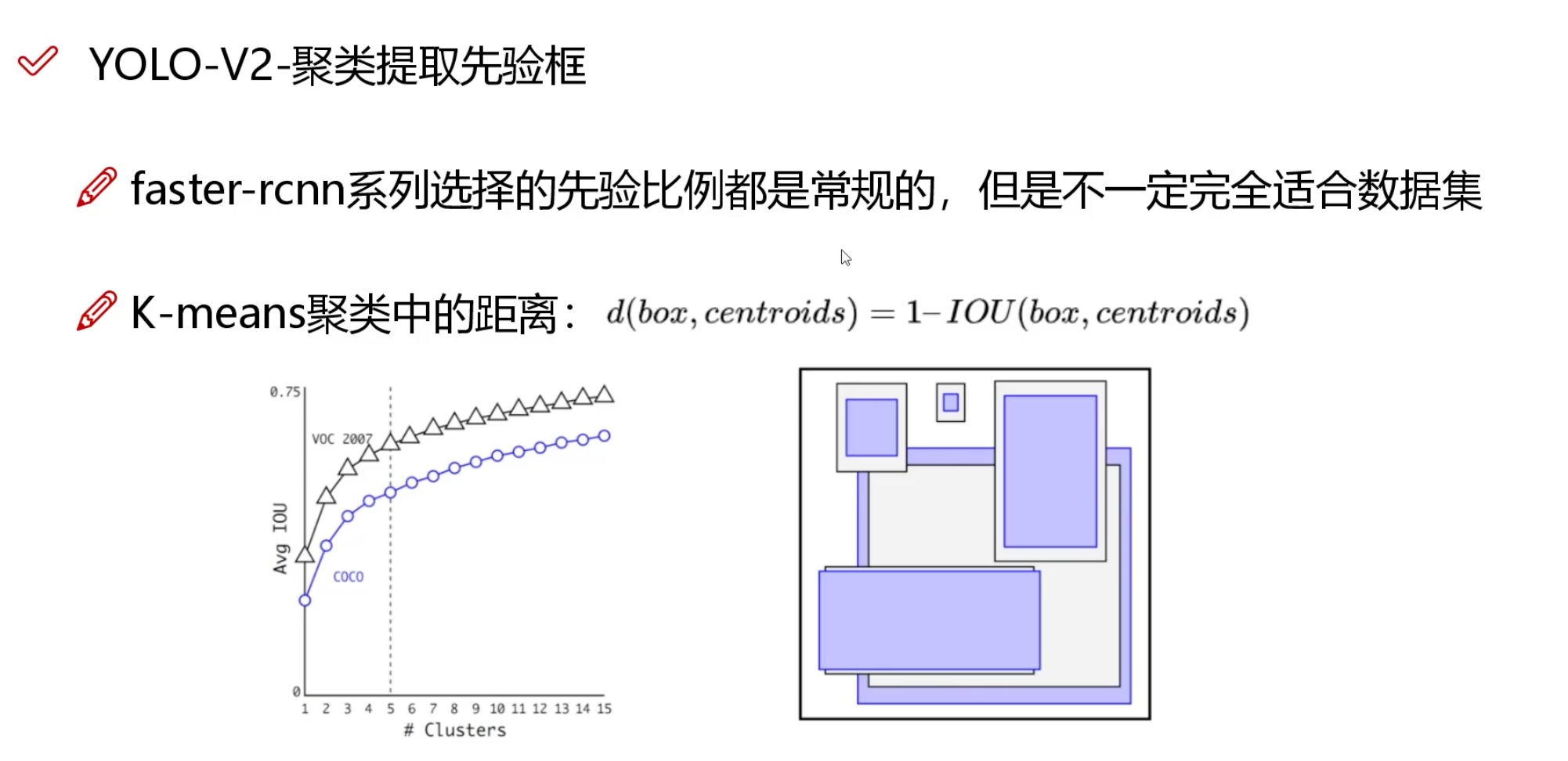
核心点:让数据自己说话。把训练集中所有真实标注框的宽高拿出来做聚类,直接提取出最符合该数据集分布的框型。
✏️ 信息
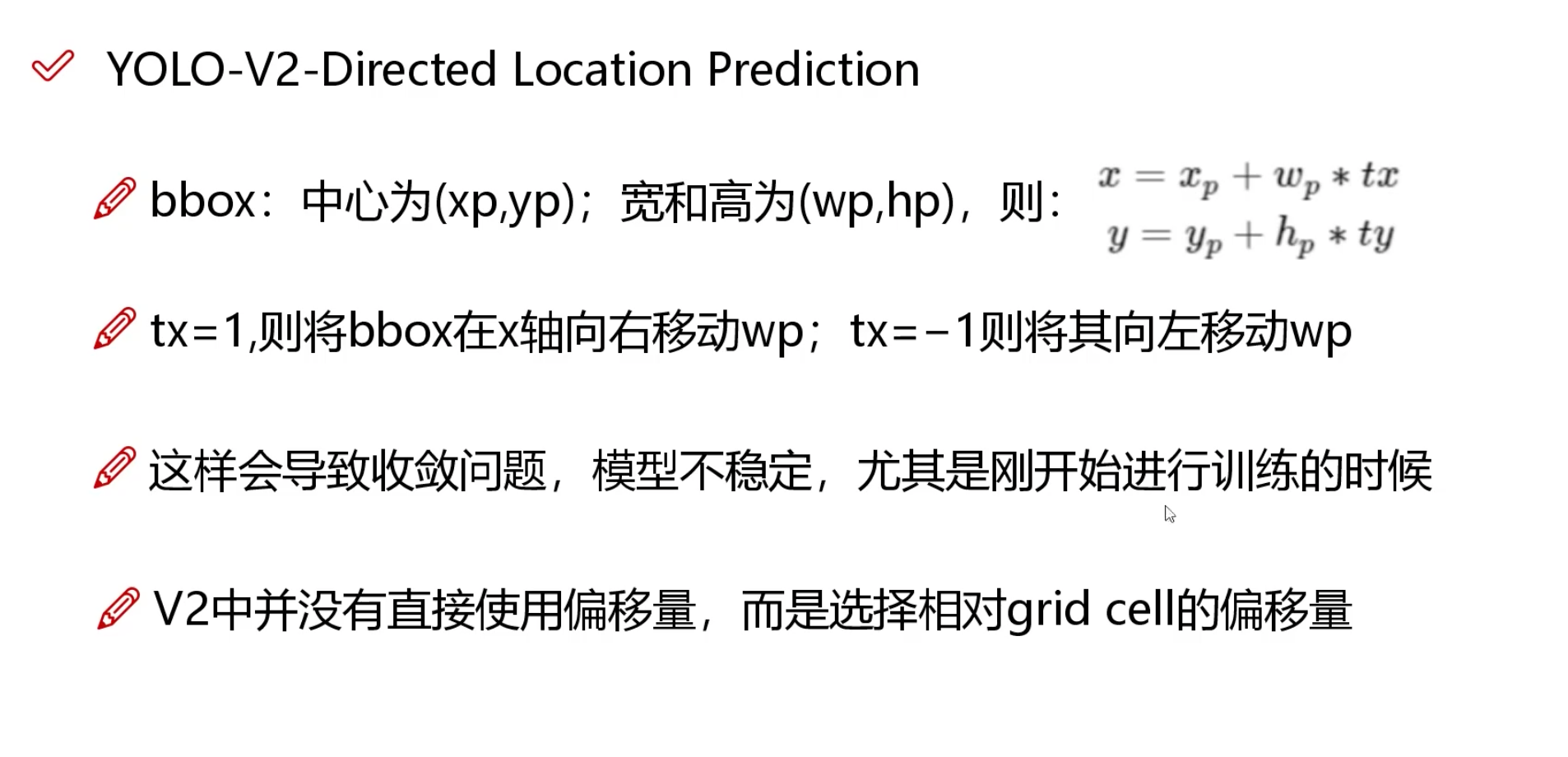
核心思想:不猜“绝对坐标”,只猜“相对偏移”
神经网络直接输出 [x, y, w, h](比如 [384, 256, 120, 80])非常难训练,因为坐标范围太大且容易跑偏。 YOLOv2 的做法是:先给每个网格发一张“默认大小的透明贴纸”(Anchor 框),然后让网络只猜 4 个微调数字:往哪挪?拉长多少?
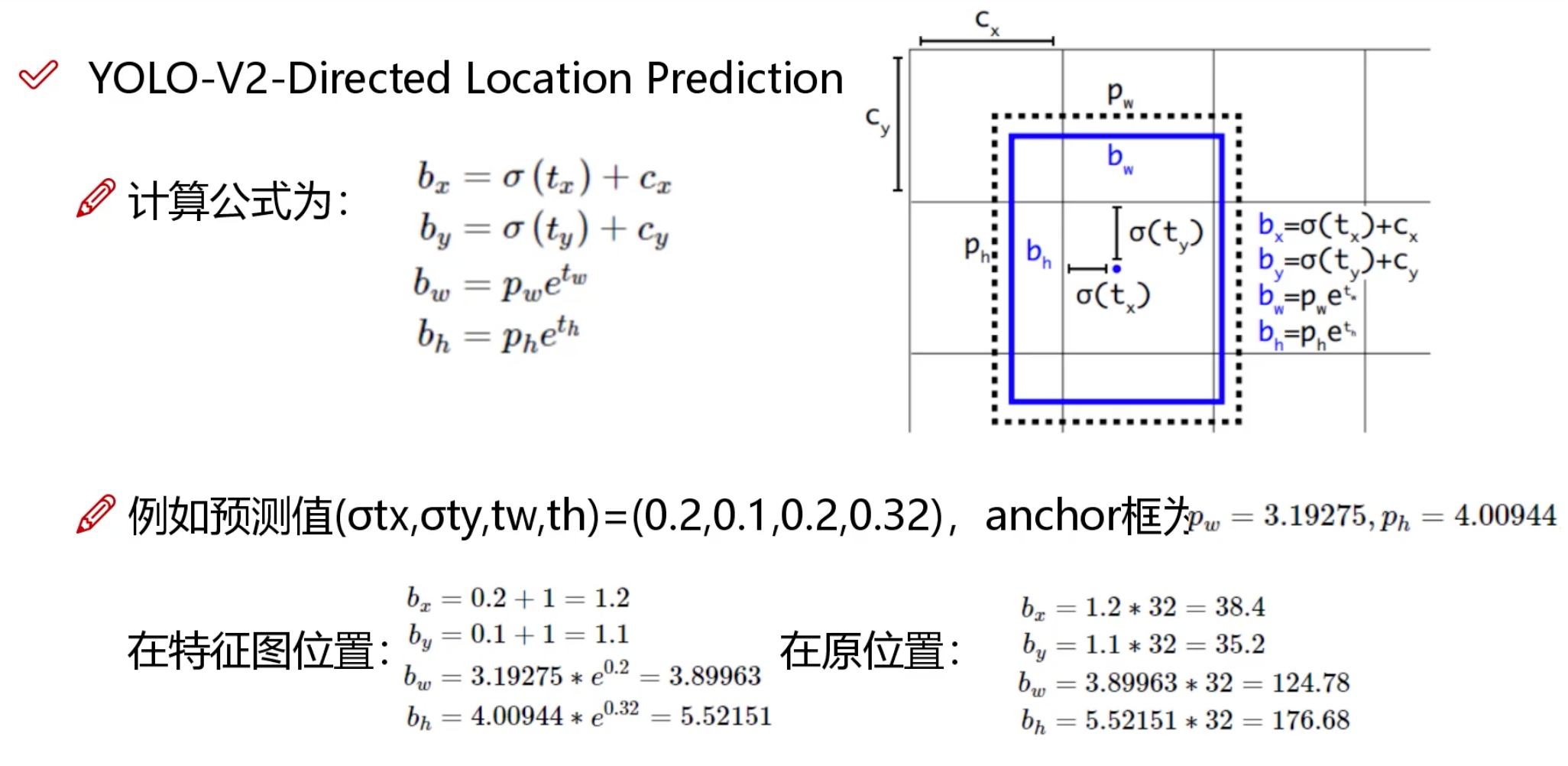
✏️ 信息
原位置计算方法:因为主干网络(Darknet-19)把原图缩小了 32 倍,所以要还原就乘以 32
- cv 相关数据集下载地址:https://public.roboflow.com/object-detection/boggle-boards
- 工程项目地址:https://github.com/orgs/ultralytics/repositories?type=all